
{kind=link}
人機一体は、先端ロボット工学技術を駆使した人間機械相乗効果器、すなわち「人機」の具現化および産業化により「あまねく世界からフィジカルな苦役を無用とする」ことを目指す立命館大学発スタートアップ企業です。滋賀県内で唯一「
J-Startup KANSAI
」(※)に選定されています。

※「
J-Startup KANSAI
」とは
経済産業省のJ-Startupプログラムの地域展開として、関西から世界へ羽ばたく有望なスタートアップを選定し、公的機関と民間企業が連携して地域ぐるみで集中支援を実施することで、選定企業の飛躍的な成長をサポートする事業です。
資金の活用用途について
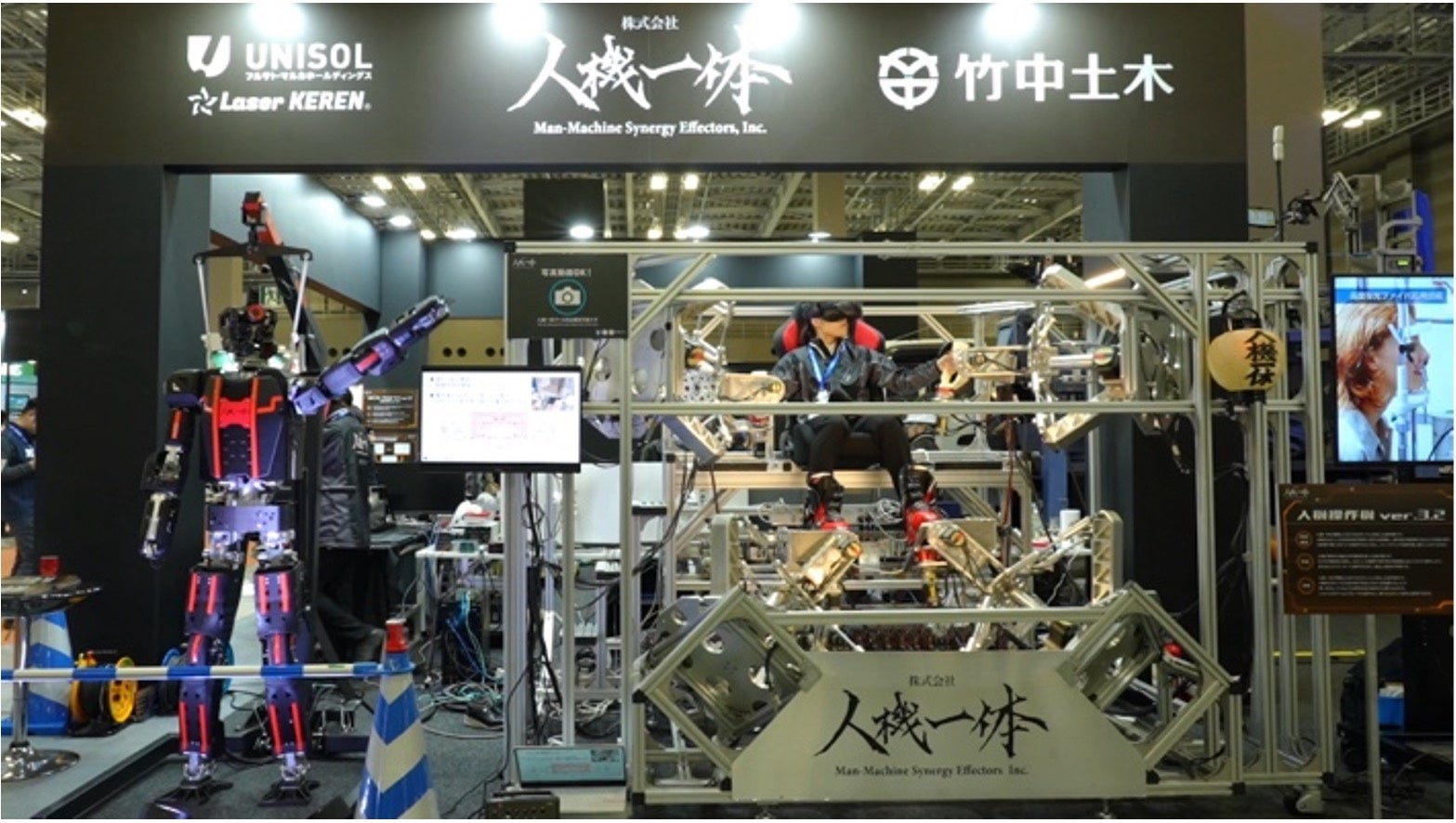
▲ 左:零一式カレイド ver.1.0 右:人機操作機 ver.3.2

▲ 零一式カレイド ver.1.0
今回の融資は、2024年8月1日に発表予定である「二足歩行人型ロボットを用いた力制御ベースの全身遠隔操作システム」等の「人機」の社会実装のための、先端ロボット工学技術の先行研究および事業拡大に向けた運転資金として活用するものです。現在は、川崎重工業株式会社のヒューマノイドロボット「Kaleido」を用いて研究開発を進めており、土木、電力、鉄道分野をはじめとするインフラメンテナンス等の現場における重作業の解消を目指しています。
参考)YouTube
株式会社人機一体 概要

代表者 :金岡博士(Dr. KANAOKA)
所在地 :滋賀県草津市青地町648-1
創立 :2007 年 10 月 01 日
創業 :2015 年 10 月 01 日(現商号への変更日)
資本金 :1 億円
事業内容:先端ロボット工学技術に基づく新規事業開発支援のための知的財産活用サービス
URL :
https://www.jinki.jp/
代表取締役 社長 金岡博士

京都大学博士(工学)取得後、立命館大学理工学部ロボティクス学科助手を経て 2003 年に立命館大学理工学部ロボティクス学科講師として就任。力学ベースのロボット工学技術の実装について研究開発を行なう傍ら 2007 年にマンマシンシナジーエフェクタズ株式会社を設立。東日本大震災時、ロボット工学技術が現場で十分に活用されていないことに無力感を覚え、事業を本格化することを決意。その決意表明として 2015 年に商号を株式会社人機一体に変更。知的財産を活用した独自の課題解決型サブスクリプションサービス、ビジネスモデルである「人機プラットフォーム」を考案し、人間機械相乗効果器、すなわち「人機」の社会実装に向けて邁進する。
2002 年 京都大学大学院 機械工学専攻 博士後期課程 研究指導認定退学
2002 年 京都大学博士(工学)取得
2002 年 立命館大学 理工学部 ロボティクス学科 助手
2003 年 立命館大学 理工学部 ロボティクス学科 講師
2007 年 マンマシンシナジーエフェクタズ株式会社(現 株式会社人機一体)設立、代表取締役 社長 就任
2008 年 立命館大学 総合科学技術研究機構 ロボティクス研究センター 客員教授
受賞 / 認証・認定
・リアルテックベンチャーオブ・ザ・イヤー 2016 グロース部門
・地域未来牽引企業
・J-Startup KANSAI
・ソーシャル企業認証制度 S 認証