{kind=link}
概要
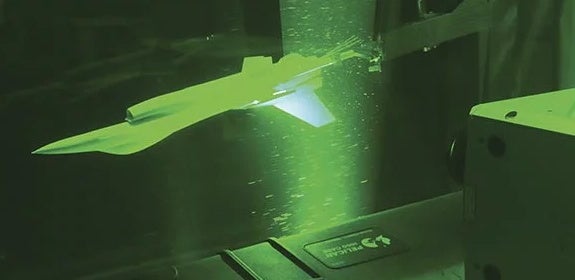
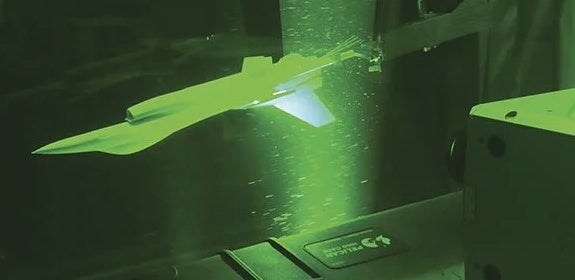
PIVは科学分析および産業用アプリケーションにおいて、流体の瞬間的な速度測定と関連特性を検知するために利用されます。例えば、風洞内の航空機の翼上の流れや人工心臓弁内の渦形成など、さまざまな流速関連のタスクに適用されます。また、LDV(レーザードップラー速度計)では1度に1ヶ所ずつ粒子の速度を測定できますが、PIV法であれば2次元または3次元で全体像を把握する事が可能です。
基本的な手法
・流体に2つの光パルス間の流動力学を忠実に追跡する「トレーサー粒子」を散布します。
・粒子が散布された流体のターゲット領域に、粒子を可視化するためにシート状の光を照射します。
・粒子の動きを使用して分析された、流れの速度と方向(速度場)を計算します。
注)リアルタイムの速度マップを作成するには、適切なカメラと専用のハードウェアを選択することが重要です
基本的な機器構成
・カメラ
・ストロボ照明またはレーザ
・シリンドリカルレンズなどの光学部品
・カメラと照明を制御するための外部トリガー用同期装置
・画像処理のためのPIV用ソフトウェア
注)光パルスを個別の画像(フレーム)でキャプチャできる「適切なカメラ」が最も重要となります
カメラの選定条件
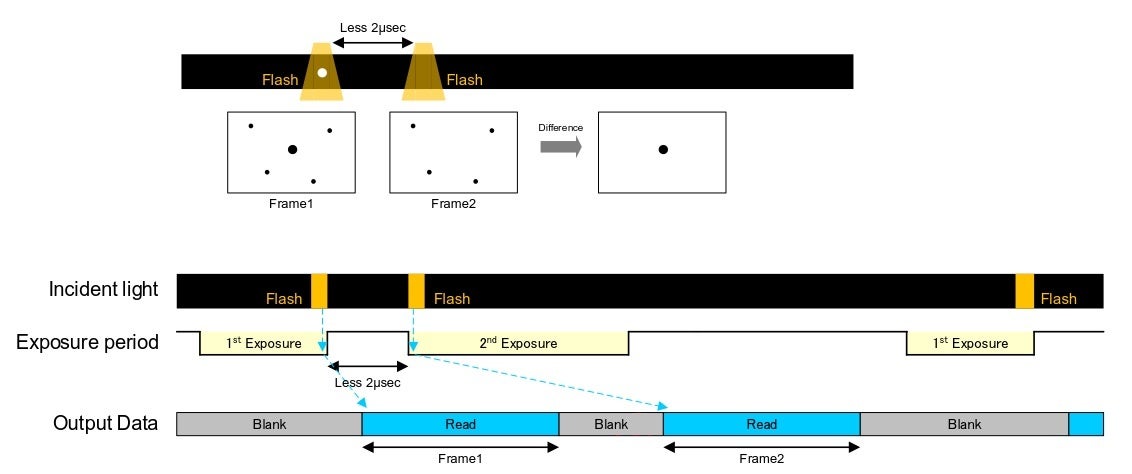
PIV分析はレーザー光を2回照射してカメラで撮影する必要があります。一般的なカメラは高速で複数のフレームを撮影する事ができないため、2回のレーザー光を同じフレームで撮影して解析を行う自己相関と呼ばれるプロセスを使用します。しかしこの方法では粒子スポットがどちらのパルスからのものであるかが明確ではないため、流体の方向が不確実なものとなります。そのためフレーム間の差を数百ナノ秒で撮影できるカメラを使用して正確な「相互相関分析」を行う必要があります。
Ximea(ドイツ) が推奨する最適なカメラ
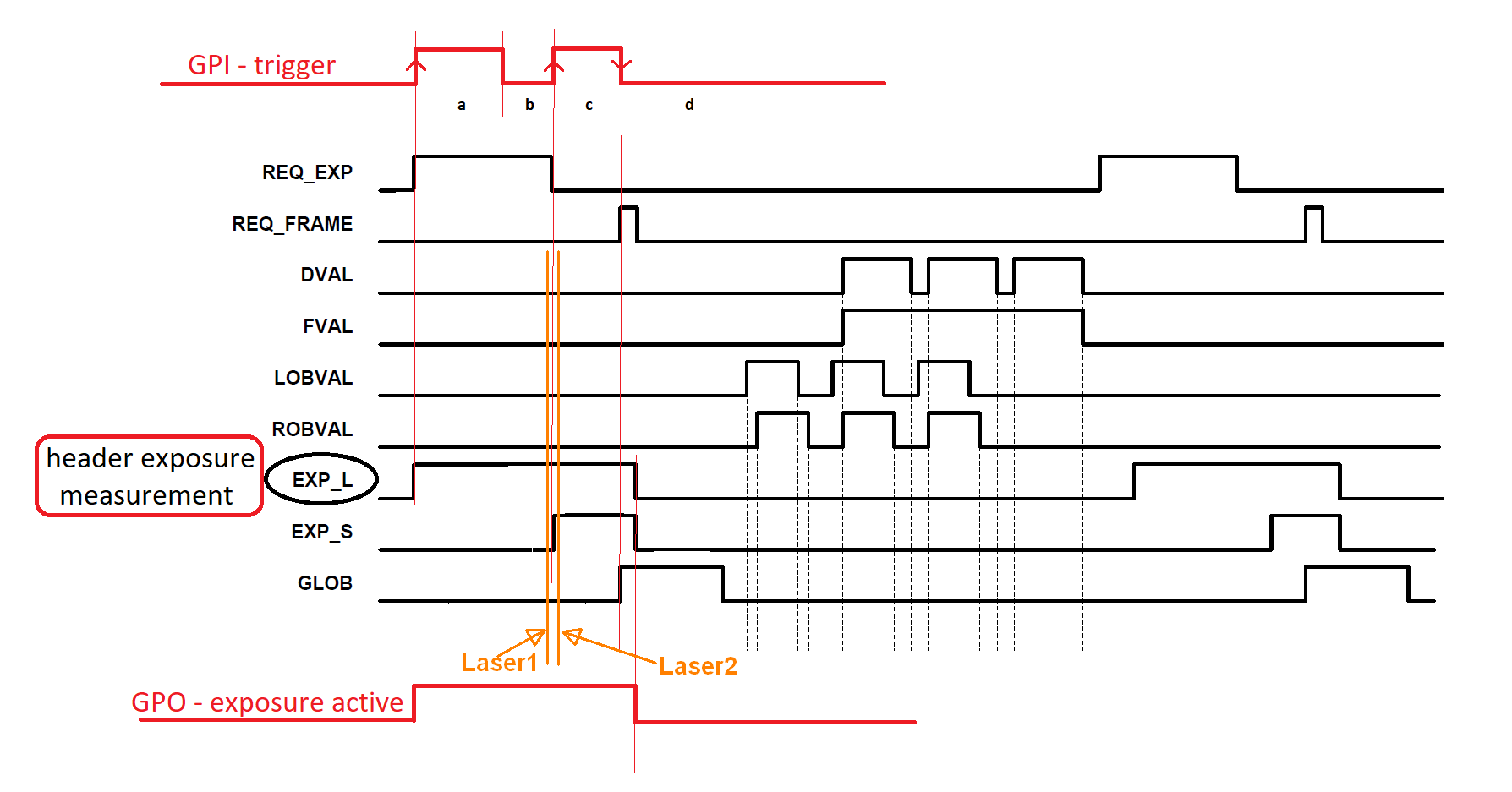
・CB500: トリガーによる二重露光制御(デュアルトリガー)を実装済 ※下図参照
・CB120: デュアルトリガーは未実装だが、センサは二重露光をサポート
・CB262: デュアルトリガーは未実装だが、センサは奇数/偶数ラインによるHDR機能をサポート
・MC161: 短い間隔で1つのフレームに複数の露光が可能
・MC203: 短い間隔で1つのフレームに複数の露光が可能
・MC245: 短い間隔で1つのフレームに複数の露光が可能